Hop-Along Cassidy
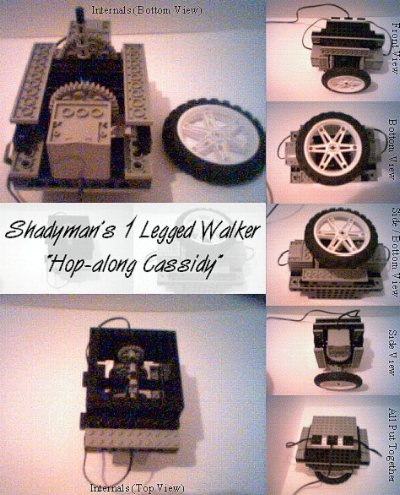
Components Used:
2 Motors
1 Touch Sensor (Mounted on RCX for Remote, Wired Control)
Required Parts:
RIS 1.0
Electrical Connector Plate (White, Comes With 9V Motor Set)
Description:
Moves from one end of the string to another. When it gets there, the touch sensor hits the wall, (Or whatever is used to hang it) and it reverses directions.
Well… What can I say? This is probably (I have yet to be proven wrong) – the LEGO Mindstorms’ Community’s First One-Legged Walker, and both simple and complex at the same time.
Two months of planning, failed designs (and waiting for my Vision Command webcam unit to arrive) has lead me to this point, getting to write all about my robot.
“Hop-Along Cassidy” uses both 9V Motors, which have been geared up and connected to create a sort of “Pulsating Shaft” (See attached videos) which quickly lifts up the foot by kicking the front “toe” (If I can call it that) into the ground, which lifts the robot up, then moves the foot so that it lands on the "heel" and moves the robot forward, and starts again. Doing this really fast creates a “Hopping” Motion. The motors are "additive", which means they combine their power so it is as if there is one, more powerful motor. This allows for a proper “Hopping” action, and also having 2 motors on opposite sides helps balance the robot.
“Hop-Along” has a generally low center-of-gravity, since the motors are the lowest part (besides the gears and the ‘foot’). This helps keep it from tipping over. As the walker progresses, it actually sways back and forth, as seen in the movies. This, I find, is actually unnoticeable because it happens so fast, though the VC Camera seems to slow it down enough.
(This is an independent site not authorized or sponsored by the LEGO Group.)
One thought on “Hop-Along Cassidy”
One legged dwarf-bot waddle waddle!