Components Used:
2 Motors
2 Touch Sensors
1 Light Sensor
Required Parts:
RIS 1.0
Parts from other LEGO Sets
Description:
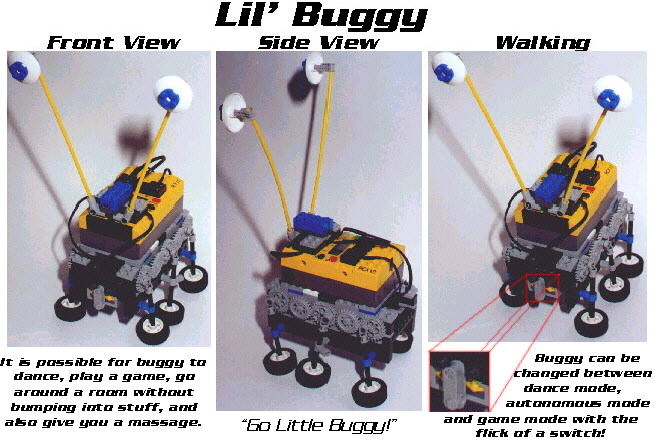
Lil’ Buggy can:
1) Dance to the Macarena
2) Run around a room by itself without bumping into anything
3) Play a game with you
4) Massage tense muscles (like the ones you get after programming a bugbot for a few hours…)
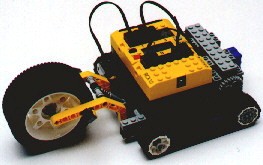
His switch (seen in picture) allows him to change between modes:
- Game Mode (Switch Right)
- Autonomous Mode (Switch in the middle)
- Dance Mode (Switch Left)
- For a Massage, you can use either Autonomous Mode or Dance Mode, depending on whether or not you want music.
GAME MODE
– Switch to the Right
In this mode, Lil’ Buggy will give you anywhere from 5-10 seconds, then it will beep. Once it has beeped, you have 1/2 a second to shine flashlight at the light sensor. (Don’t complain, it is possible, it helps to have the flashlight on and be ready to point it at the sensor.)
If you are able to do this, it will reward you with a sound like when it finishes downloading something. (Fast ascending sweep). If you can’t do this, it gives a low buzzing sound.
AUTONOMOUS MODE
– Switch in the Center
In this mode, Lil’ Buggy can roam free through a room without hitting anything.
This is done thanks to Proximity Sensing (the RCX sends out an infrared signal, which, if the RCX is close to something, will be picked up by the light sensor, and a certain string of codes will be executed)
For more information on Proximity Sensing, try searching in the LEGO Mindstorms Forums.
DANCE MODE
– Switch to the Left
In this mode, Lil’ Buggy burns up the dance floor dancing to the Macarena!
If only I had a video camera…
Not really much to explain about this mode – Lil’ Buggy dances to the Macarena, which it plays out of it’s internal speaker.
MASSAGE
– Either Switch to the Left or in the Center
This mode lets you relieve your stress while Lil’ Buggy massages you. (Quite handy after spending hours on the net… Trust me, I know.)
If you have the Switch to the Right, Buggy will dance on your back while playing the Macarena.
If you have the Switch in the Middle, Buggy will move forward.
(Both ways give you a good massage…)
I think this is my best robot so far.
“Go Little Buggy!”
(This is an independent site not authorized or sponsored by the LEGO Group.)
Views: 4,500