Super Bugbot
Components Used:
2 Motors
2 Touch Sensors
Required Parts:
RIS 1.0
Description:
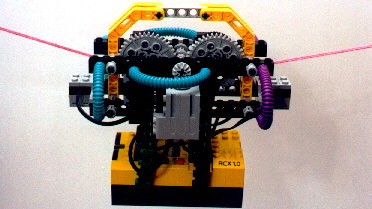
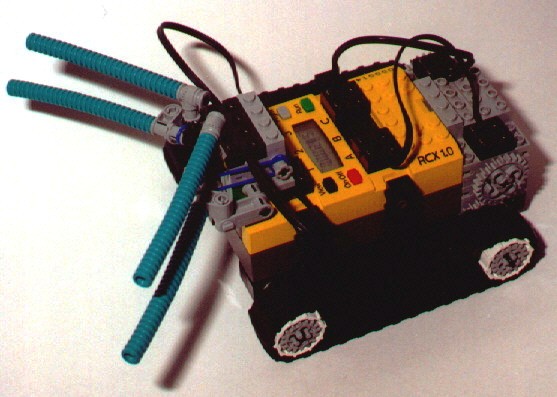
In essence, this is Dave Baum’s BugBot, (No copyright infringement intended). I added an extra set of antennae (To be able to sense further up, so it wouldn’t get stuck under the bottom of a chair, counter, etc). I also made the speed faster in the program so it can run around the room a little more efficiently.
Instructions:
Building instructions for Bugbot are found on page 109 of Dave Baum’s Definitive Guide to Lego Mindstorms Robots
(This is an independent site not authorized or sponsored by the LEGO Group.)