Big-Wheel
Components Used:
2 Motors
1 Light Sensor
1 Touch Sensor
Required Parts:
RIS 1.0
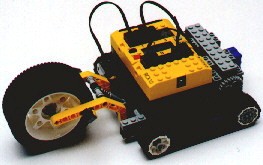
Description:
The robot moves forward until it hits something, (The wheel is forced upwards enough to activate the touch sensor behind), then it moves backwards, turns slightly, and moves forwards again. It also has a light sensor on the back for line-following.
(This is an independent site not authorized or sponsored by the LEGO Group.)